Towards Agile, Safe, Precise, and Adaptive Robots for the Real World
The Hybrid Intelligent Experimental Robotics (HIER) Lab develops next-generation humanoid robots capable of operating autonomously in complex and dynamic environments. Our research bridges planning, control, learning, and physical interaction to create robots that move beyond simple terrain traversability and achieve true physical intelligence.
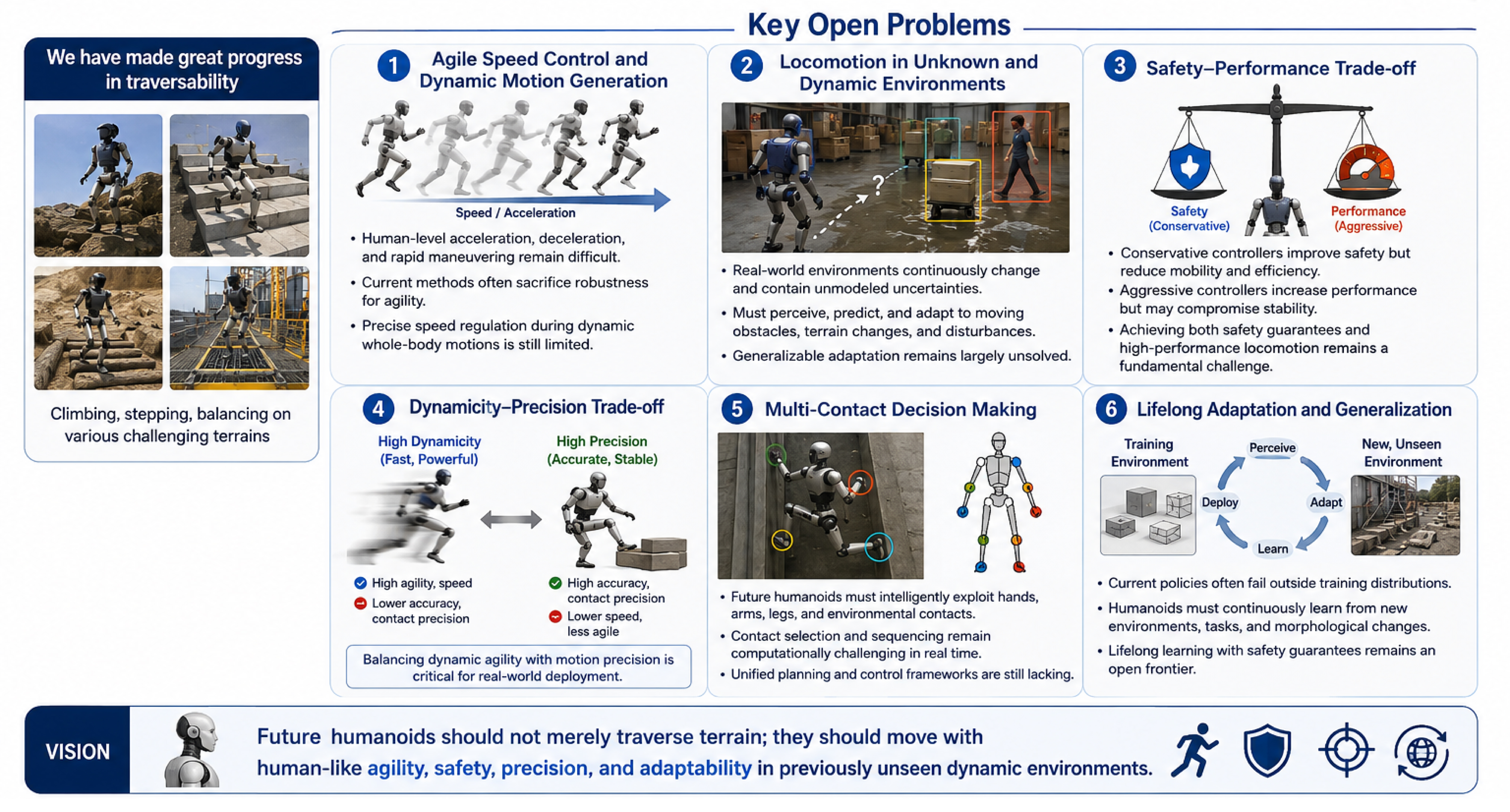
Recent breakthroughs have enabled humanoid robots to walk, climb stairs, and traverse rough terrain. However, operating in the real world requires substantially more than standard locomotion. To achieve true full autonomy, future humanoids must simultaneously master Agility, Safety, Precision, and Adaptability. These requirements introduce deep theoretical and experimental trade-offs that define the core research agenda of the HIER Lab.
Core Research Pillars
🚀 Pillar 1: Agile Speed Control & Safety-Critical Dynamics: We develop optimization-based control architectures and dynamic locomotion strategies that allow full-body humanoids to maneuver with human-level agility while providing mathematical safety guarantees.
- Agile Motion Generation: Overcoming the limitations of current methods by enabling rapid acceleration, deceleration, and sharp maneuvering without sacrificing whole-body balance.
- Safety–Performance Optimization: Utilizing Control Barrier Functions (CBFs) and Model Predictive Control (MPC) to establish formal safety boundaries, allowing the robot to maximize performance without risking catastrophic system instability.
- Dynamicity-Precision Balancing: Developing frameworks that resolve the inherent trade-off between high dynamicity (fast, powerful motions) and high precision (accurate, stable contact execution) during rapid real-world deployment.
🤝 Pillar 2: Multi-Contact Planning & Environmental Intelligence: We empower humanoid robots to intelligently perceive their surroundings and exploit multi-contact interactions with the environment to expand their stability, reachability, and task capabilities.
- Locomotion in Unmodeled Environments: Engineering real-time perception and predictive control algorithms that allow legged systems to adjust to moving obstacles, sudden terrain variations, and external disturbances.
- Multi-Contact Decision Making: Solving computationally intensive mixed-integer and non-linear optimization problems to enable robots to autonomously determine when, where, and how to sequence contacts using hands, arms, and legs.
- Whole-Body Loco-Manipulation: Creating unified frameworks where locomotion and manipulation merge, enabling rich physical interaction with unstructured surroundings.
🧠 Pillar 3: Lifelong Adaptation & Embodied AI: We investigate data-driven methods and modern robotic learning paradigms to build humanoids capable of continuous improvement throughout their operational lifespan.
- Sim-to-Real Generalization: Applying advanced Reinforcement Learning (RL) that remains robust even when deployed well outside the initial offline training distributions.
- Lifelong Learning with Safety Bounds: Developing adaptation loops—Perceive, Adapt, Learn, Deploy—ensuring the robot continuously learns from new tasks and environments without catastrophic forgetting.
- Morphology-Aware Intelligence: Designing algorithms that automatically compensate for physical or morphological changes in the robot hardware during long-term field deployment.