
Hybrid Intelligent Experimental Robotics (HIER) Lab
Legged Humanoid and Animaloid Robotics • Loco-Manipulation • Whole-Body Control • Robot Intelligence

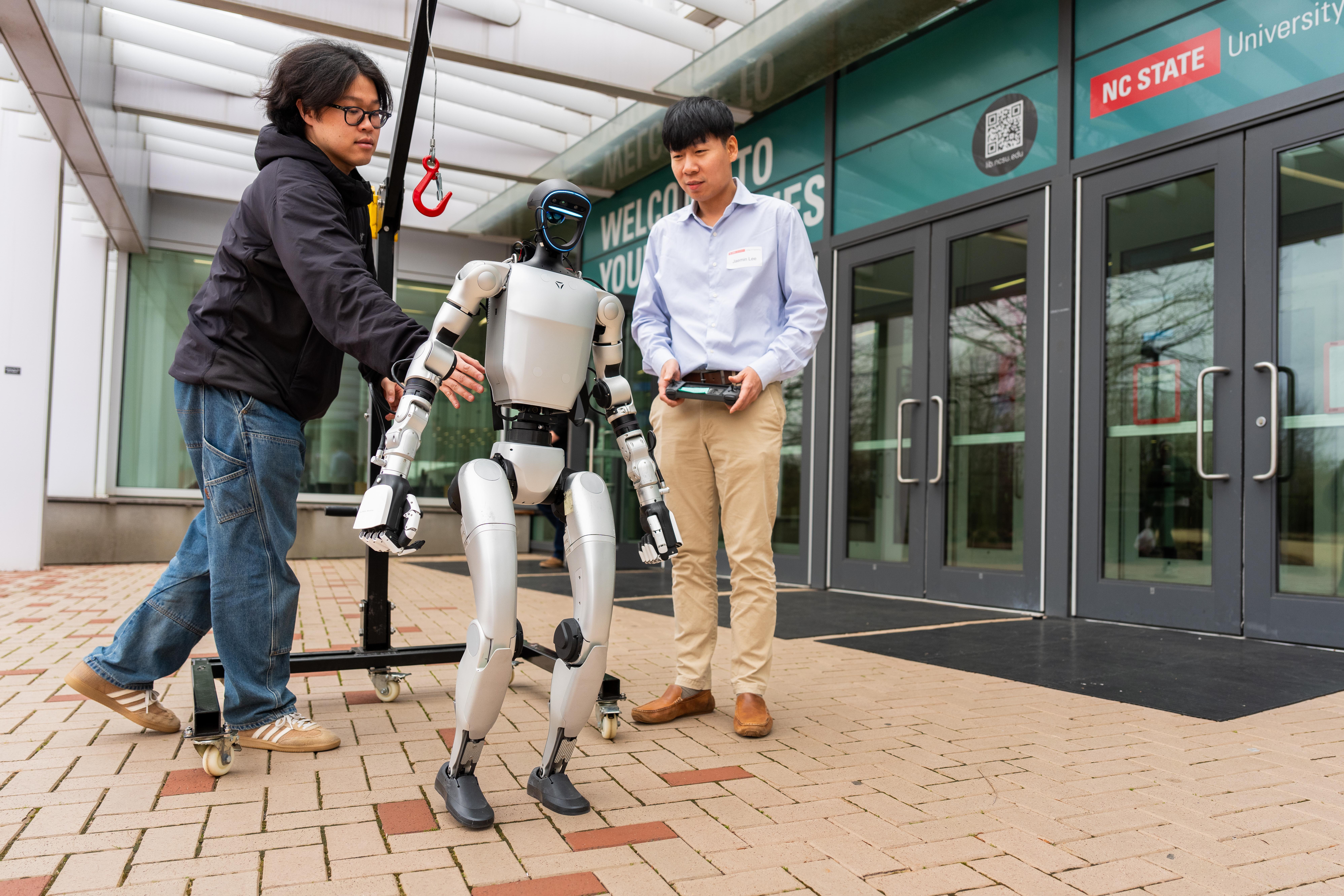
The HIER Lab is affiliated with the Department of Mechanical and Aerospace Engineering at NC State University and the Joint Department of Biomedical Engineering at UNC–Chapel Hill and NC State University. We develop intelligent legged robots capable of agile loco-manipulation in complex environments. Our research spans theoretical and experimental robotics, enabling robots to operate safely and efficiently in environments shared with humans and wildlife.
Research

Autonomous Loco-Manipulation
Planning and control frameworks enabling humanoid robots to perform autonomous loco-manipulation tasks.
Hybrid Dynamical Systems
Modeling and analysis of hybrid dynamical systems arising in legged robots with multiple contacts.
Learning-Based Robotics
Applying reinforcement learning and data-driven methods to develop adaptive robotic behaviors.

Tele Whole-Body Control
Developing tele-operation frameworks enabling intuitive control of humanoid robots.

Safety-Critical Control
Studying control theory for ensuring safety of full-body humanoid robots.
Heterogeneous Robot Team
Develoing unified frameworks for collaborating among heterogeneous robots, enabling coordinated loco-manipulation and task execution.

Robotic Hardware Innovation
Designing robotic hardware for efficient and robust mission execution.
Generative AI for Motion
Integrating generative AI with dynamically consistent motion primitives.
Recent News
[2026] Dr. Lee awarded NVIDIA Academic Award to support humanoid research in HIER lab.
[2026] HIER Lab participated in NC State Robotics Symposium 2026. Dr. Lee gave a talk on COE initiative in ``Human-centered Robotics''.
Link
[2026] NC State highlights Dr. Lee's vision to develop the next “Optimus Prime”.
Link
[2025] HIER Lab acquired Franka Research Robot 3 manipulators.
[2025] HIER Lab renovated and fully operational (EB3-1309).
[2025] Dr. Lee appointed Associate Faculty in Biomedical Engineering.
[2025] ICRA 2025 paper accepted.
[2025] ACC 2025 workshop accepted.
Join Our Lab
We expect openings for 2027 PhD students and postdocs in: 1) Hierarchical RL-based Whole-Body Control, 2) Tele Whole-Body Control of Humanoids. Submit interest form: Ph.D. Students and Postdoc Application Form You must also apply through the official graduate admissions system.
We have openings for undergraduate and master students in: 1) Robot hardware design, 2) Electrical Circuit Design for Actuator Control. Submit interest form: Undergraudate and Master Students Application Form